|
|
|
|
|
충전소를 찾지 않아도 되는 전기차 시대가 가까워졌다. UNIST 연구팀이 운행 중인 차량에 무선으로 전력을 공급하는 기술을 개발했다. UNIST(총장 박종래) 전기전자공학과 변영재 교수팀은 이동 중인 차량에 끊김이 없이 전력을 공급하는 '무선 전력 공급 트랙'을 개발했다. 전선으로 구성된 넓고 강한 자기장을 형성해 고가 자석인 강자성체 없이도 앞뒤 좌우 유연한 차량 주행이 가능하다. 전자파 발생기에 전류를 흐르게 하면 원형 자기장이 생긴다. 여러 전선으로 자기장의 범위가 넓어지면서 전력이 효율적으로 전달된다. 전기차는 이 넓은 자기장이 형성한 전력 공급 트랙 위에서 유연하게 주행할 수 있다. 전력 공급 트랙과 전력 수신기의 구조를 최적화하는 알고리즘도 개발했다. 전기차 전력 전달 효율을 최대 90%까지 끌어올렸다. 기존 기술은 강자성체를 사용해 효율을 높이려 했으나, 높은 가격과 약한 내구성 문제로 실제 적용이 어려웠다. 무선 전력 공급 기술이 실생활에 적용될 수 있도록, 연구팀은 전기전자공학자협회(IEEE) 및 국제비전리복사보호위원회(ICNIRP) 표준 인증 등 인체 안전성 검증도 마쳤다. 변영재 교수는 “전기차를 비롯한 운송수단은 평행 방향뿐 아니라 수직 방향으로도 유연하게 주행해야 하는데, 기존 다이내믹 무선 충전 기술은 이를 실현하지 못했다”고 설명했다. 조현경 제1저자는 "이 기술이 전기차에 적용되면 긴 충전 시간과 짧은 주행거리 문제를 해결할 수 있다"며, "배터리 양을 줄이면 리튬 등 자원 채취로 인한 공해도 줄일 수 있어 천연자원의 지속 가능한 사용도 가능하다"고 말했다. 연구 결과는 국제학술지 Applied Energy에 8월 12일 게재됐다. 연구는 과학기술정보통신부 정보통신기획평가원(IITP)의 ‘지역지능화혁신인재양성사업’과 한국연구재단(NRF)의 지원을 받아 수행됐다. (논문명: A coreless track-type seamless wireless charging system using co-planar wires enabling quasi-free planar movements for mobile logistics robots) |
|
|
|
[붙임] 연구결과 개요, 용어설명, 그림설명 |
[연구결과 개요]1. 연구배경생산성 향상과 비용 절감을 위해 AGV, AMR과 같은 모바일 로봇들이 생산과 물류 현장에 도입되고 있습니다. 모바일 로봇들은 배터리를 탑재하고 있으며, 배터리로부터 전력을 공급받아 구동됩니다. 모바일 로봇의 배터리를 충전하는 방법은 크게 정적형(Static charging)과 동적형(Dynamic charging)으로 나뉩니다. 정적형 충전 방법은 다시 접촉 방식과 비접촉 방식(무선식)으로 나뉩니다. 접촉 방식은 간단한 구성 방식 때문에 많이 쓰이지만, 접촉부의 손상과 먼지와 수분으로 일어날 수 있는 전기 쇼크의 위험이 있습니다. 비접촉 방식은 접촉 방식이 가지는 문제를 방지할 수 있지만 여전히 긴 충전 시간과 짧은 구동 시간의 단점이 있습니다. 동적형 충전 방법은 무선 전력 공급 트랙을 이용해 움직이고 있는 모바일 로봇을 충전합니다. 동적형 충전 방법은 모바일 로봇의 작업 효율을 높이고, 배터리 수명을 연장하며, 더 나아가 배터리 없는 로봇도 가능하게 합니다. 동적형 충전 방법은 다시 배열 솔레이노이드(Arrayed Solenoid type) 방식과 트랙 방식(Track type)으로 나뉩니다. 배열 솔레노이드 방식은 스마트폰 무선충전기 내부의 코일(솔레노이드)을 모바일 로봇의 이동 경로를 따라 배열한 형태로, 일정한 전력을 공급하지 못해 시스템이 매우 불안정합니다. 트랙 방식은 경로를 따라 일자로 설치된 전력 발생기(Transmitter)를 이용하기 때문에 일정한 전력을 공급할 수는 있으나, 유연 주행(Flexible driving)이 불가하고, 전력 발생기에 강자성체(Ferromagnetic material)를 이용해 비용적인 측면과 내구성 측면에서 불리합니다. 따라서, 산업현장에 적용될 수 있으며 자유로운 모바일 로봇의 주행을 보장하는 트랙 방식의 전력 공급 기술이 필요하게 되었습니다. 2. 연구내용본 연구팀은 전력 발생기에 강자성체를 적용하지 않고 모바일 로봇의 유연 주행을 보장하는 무선 전력 공급 트랙을 개발했습니다. 기술 원리는 일자 형태의 전자파 발생기에 전류가 흐르면 근처에 원형의 자기장이 생기고, 이 자기장이 고리 형태의 전력 수신기를 통과하면서 전력이 무선으로 전달되는 방식입니다. 본 기술은 복수의 전선으로 전자파 발생기를 구성하여 넓고 강한 자기장을 형성해 전력 수신기가 전선의 수평 방향과 수직 방향으로 자유롭게 이동할 수 있습니다. 본 연구팀은 높은 효율로 일정한 전력을 보낼 수 있게 전자파 발생기를 구성하는 전선의 가닥수와 간격을 최적화하는 알고리즘을 확보했습니다. 전력 수신기(Receiver)는 전력 발생기로부터 전력을 최소한의 손실로 받기 위해 강자성체를 포함하며, H형 강자성체로 설계되어 모바일 로봇이 다양한 주행 방향과 각도에서 효율적으로 전력을 수신할 수 있도록 했습니다. 또한, 강자성체 내부에 생기는 자기 손실을 억제하기 위해 인위적인 공기층을 포함해 전력 전달 효율을 90%까지 끌어올렸습니다. 최적화된 전력 발생기와 수신기를 이용해 경로의 수평 방향, 수직 방향, 회전 주행에서 효율을 측정한 결과, 최저 효율 82%, 최고 효율 90%의 안정적인 유연 주행을 보장하는 결과를 얻었습니다. 본 연구팀은 개발한 기술이 실제 용도에 적용될 수 있도록 2대 이상의 모바일 로봇을 충전할 수 있는 전력 컨트롤 피드백 알고리즘과 전기전자공학자협회(IEEE)와 국제비전리복사보호위원회(ICNIRP)의 표준에 부합하는 인체 안전성에 대한 검증을 마쳤습니다. 3. 기대효과본 논문의 기술은 트랙 위에서 이동하는 로봇에 끊김없이 전력을 공급하는 것을 특징으로 합니다. 로봇이 앞뒤, 좌우로 이동하더라도 전력이 끊기지 않으며, 60도 이하의 회전에서도 전력을 안정적으로 공급합니다. 따라서 제안한 기술은 전력 공급 트랙 위의 로봇이 배터리 없이도 운행할 수 있게 합니다. 이는 로봇을 기반으로 한 산업 자동화를 촉진하고 완전히 무인화된 스마트 공장의 성장을 도모하며, 근미래에 예상되는 노동력 부족 문제를 해결할 수 있는 핵심 기술로 기대됩니다. 제안한 무선 전력 전송 방식은 추후 연구를 통해 물류 로봇을 넘어 2차원 움직임을 가지고 전기를 동력으로 하는 자전거, 오토바이, 자동차 등 일반적인 이동체에 적용될 수 있습니다. 따라서 본 기술의 영향력은 산업 자동화에 국한되지 않고, 전기차 시장이 캐즘(Chasm)을 넘어서게 하는 하나의 솔루션으로 주목받고 있습니다. 또한, 제안한 기술은 전기를 동력으로 움직이는 이동체의 배터리 양을 크게 줄일 수 있어 리튬 등 자원 채취로 인한 공해를 줄이고, 천연자원의 지속 가능한 사용법에 대한 새로운 방향을 제시하는 기술로 평가받고 있습니다. |
[용어설명]1. AGV (Automated Guided Vehicle)지정된 경로를 따라 움직이는 무인 자동 운반 장치 2. AMR (Autonomous Mobile Robot)스스로 맵핑을 통해 경로를 찾아 움직이는 자율 이동 로봇 3. 정적형 충전 방법 (Static charging)정차한 운송 수단을 충전하는 방법 4. 동적형 충전 방법 (Dynamic charging)움직이고 있는 운송 수단을 충전하는 방법 5. 배열 솔레노이드 방식 (Arrayed Solenoid type)코일(솔레노이드)이 배열된 모습의 동적형 충정 방법 6. 트랙 방식 (Track type)경로를 따라 평행하게 구성된 동적형 충전 방법 7. 전력 발생기 (Transmitter)무선 충전 기술에서 전력을 무선으로 보내는 기기 8. 전력 수신기 (Receiver)전력 발생기에서 생성된 자기장을 획득하여 전자기기에서 사용할 수 있는 전력으로 변환하는 기기 9. 유연 주행 (Flexible driving)지정된 경로를 따라 움직이는 무인 자동 운반 장치 10. 강자성체 (Ferromagnetic meterial)내부에 강한 자기장을 유도할 수 있는 자성체 11. 전기전자공학자협회 (IEEE, Institute of Electrical and Electronics Engineers)전기전자공학 전문가들의 국제조직 12. 국제비전리복사보호위원회 (ICNIRP, International Commission on Non-Ionizing Radiation Protection)비전리방사선의 일반 대중과 근로자에 대한 보호를 목적으로 구성된 조직 |
[그림설명]
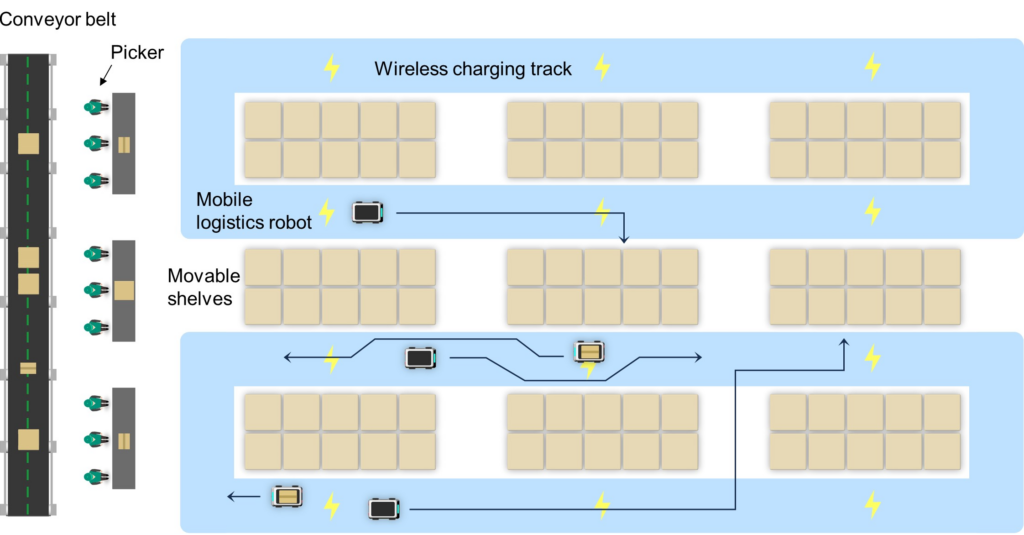
그림1. 제안 무선 전력 전송 기술이 물류 로봇에 응용된 예시전력 공급 트랙이 설치된 물류 창고와 물류 로봇을 도식화한 그림
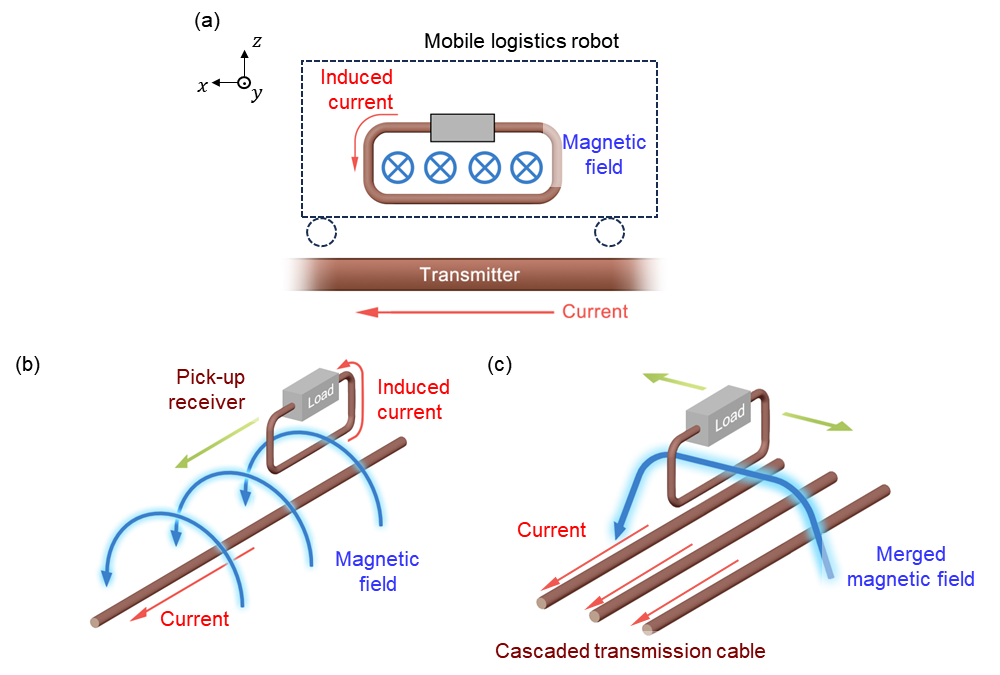
그림2. 시스템의 개요와 원리(a) 전력 수신기가 전력을 획득하는 원리. (b) 전력 송신부가 자기장을 형성하는 원리. (c) 제안하는 유연 주행이 가능한 무선 전력 전송 트랙의 원리
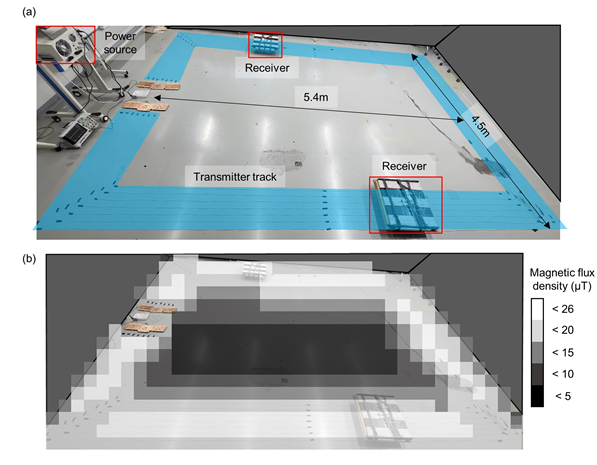
그림3. 두 대의 로봇을 위한 무선 전력 전송 실험(a) 실험 환경. (b) 전력 전송 트랙 위의 다양한 위치에서의 자속밀도
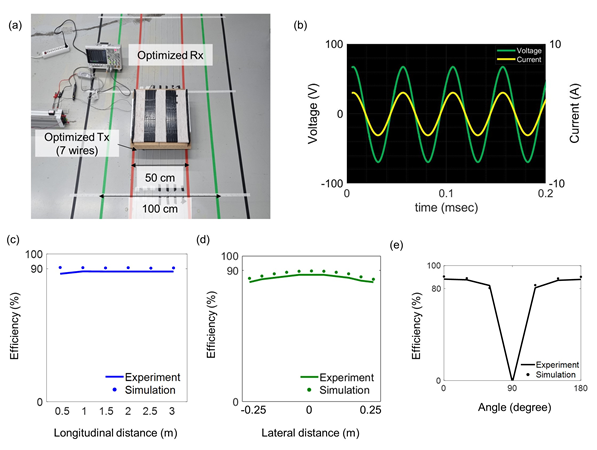
그림4. 제안 기술을 이용한 전력 송신 실험 결과(a) 실험 환경. (b) 전력 수신부에 전달된 100W의 전압, 전류 파형. (c) - (e) 각각 수평 방향, 수직 방향, 회전 주행 시 전력 전송 효율 실험 결과 |
|
|
UNIST 홍보팀 news@unist.ac.kr TEL : 052)217-1230FAX : 052)217-1229 |




![[연구그림1] 제안 무선 전력 전송 기술이 물류 로봇에 응용된 예시](https://news.unist.ac.kr/kor/wp-content/uploads/2014/11/press_20141125_04.jpg)
![[연구그림2] 시스템 개요와 원리](https://news.unist.ac.kr/kor/wp-content/uploads/2014/11/press_20141125_03.jpg)
![[연구그림3] 두 대의 로봇을 위한 무선 전력 전송 실험](https://news.unist.ac.kr/kor/wp-content/uploads/2014/11/press03_20141125.jpg)
![[연구그림4] 제안 기술을 이용한 전력 송신 실험 결과](https://news.unist.ac.kr/kor/wp-content/uploads/2024/08/연구그림4-제안-기술을-이용한-전력-송신-실험-결과-151x114.png)