
뇌졸중 환자 손목의 뻣뻣함을 정확히 측정하는 기술이 개발됐다. 이 기술이 적용된 재활로봇은 세계 최초로 사람 손목과 아래팔의 뻣뻣함을 과학적으로 측정했다. 감각에 의존하던 진단이 정확해지면 재활치료 효과도 크게 높일 수 있을 전망이다.
강상훈 기계항공 및 원자력공학부 교수는 손목과 아래팔의 기계적 저항(Mechanical Impedance)을 로봇으로 수분 내에 정량적으로 측정할 수 있는 기술을 개발했다. 지능형 제어기법과 시스템 식별 방법을 결합한 이 기술의 이름은 ‘dIMBIC 기반 기법(dIMBIC-based method)’이다.
강상훈 교수는 “이 기술은 뇌졸중 같은 신경질환의 정량적 객관적 진단보조에 활용할 수 있다”며 “산재병원을 비롯한 재활병원 등에서 환자 및 장해맞춤형 정밀 로봇재활의 새 장을 여는 데 기여할 것”이라고 기대했다.
뇌졸중은 세계적으로 연간 1500만 명에게 발생하는 신경질환이다. 뇌졸중 환자의 손목 같은 관절에는 경직(spasticity)이 나타나며, 근육과 인대 등에 걸쳐 변화가 발생해 뻣뻣해진다고 알려졌다. 즉, 관절의 기계적인 저항이 증가하는 것이다. 이때 서로 다른 관절 사이에서 결합된(coupled) 기계적 저항이나 한 관절 안에서 다른 방향으로 결합된 기계적 저항이 달라지기도 한다.
임상전문가들은 손으로 환자의 관절을 움직여보고, 관절의 기계적 저항력의 크기를 평가한다. 이를 바탕으로 경직 정도를 정성적으로 진단하는 것이다. 이 경우 사람의 경험과 손 감각에 의존하므로 결과가 달라질 수도 있다. 또 손이 두 개뿐이라 한 번에 한 관절/방향(자유도)의 기계적 저항만 평가할 수 있다는 한계도 있다.
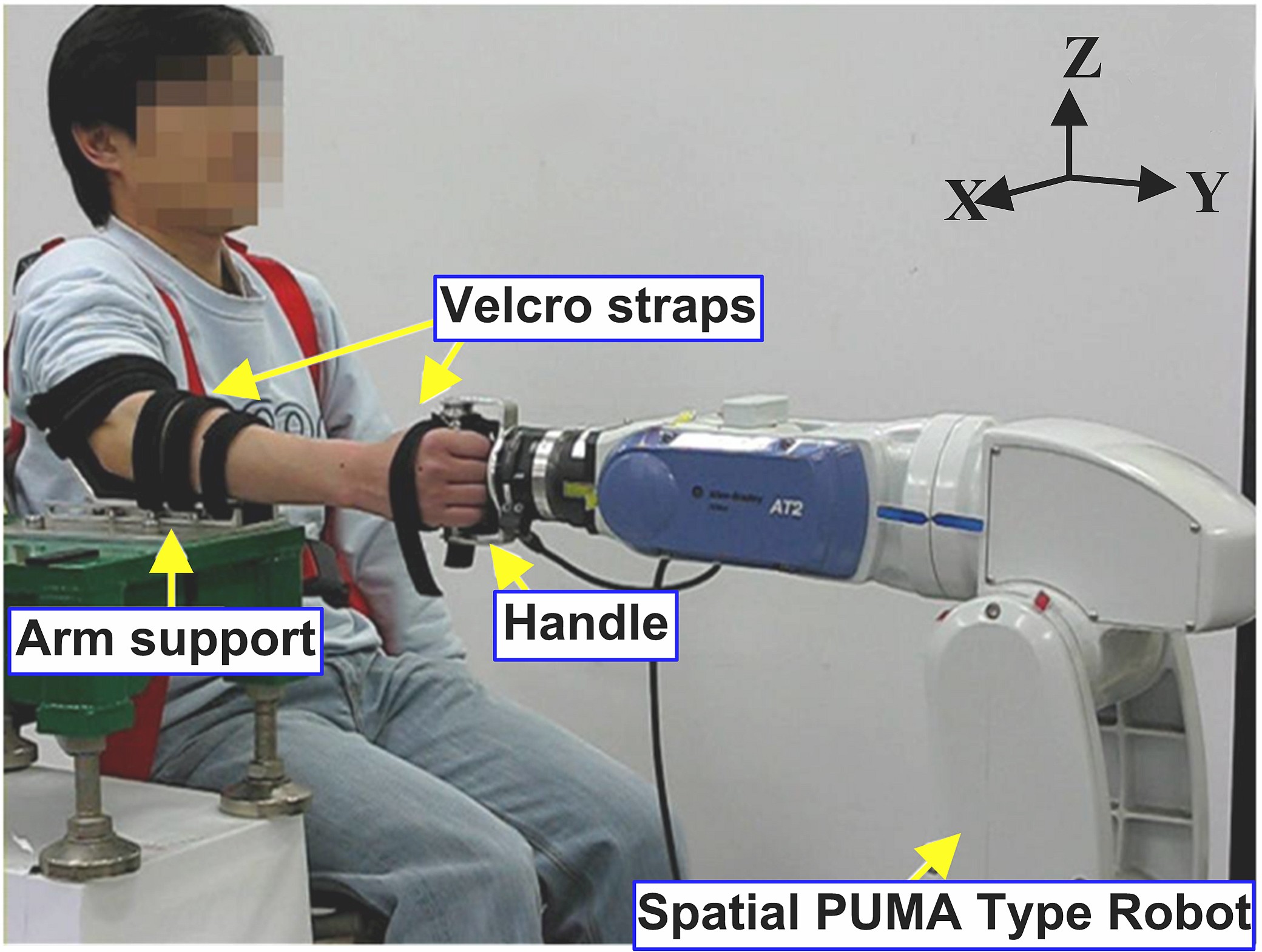
이번 기술은 로봇으로 이런 한계를 극복했다. 로봇이 마사지 기계처럼 작은 진동을 주면, 손목과 아래팔에는 그 힘에 따른 움직임이 생긴다. 이를 측정하면 기계적 저항 값을 객관적‧정량적으로 파악할 수 있다. 이 기술은 특히 손목과 아래팔의 경직을 여러 방향에서 측정 가능하다. 연구진은 세 방향 회전(굴신, 척굴-요굴, 회내-회외)을 측정해 세 방향 각각과 다른 방향 간 결합된 기계적 저항 값을 알아냈다.
dIMBIC 기반 기법은 ‘내부모델제어 기반 강인 임피던스 제어(IMBIC)’로 로봇 힘을 지능적으로 정밀하게 제어한다. 로봇으로 측정된 결과는 공학 분야에서 널리 활용되는 ‘웰치스의 주기성도표(Welch’s periodogram)’ 방법을 통해 분석한다.

손목과 아래팔의 다관절‧다자유도 기계적 저항 측정 방법(dIMBIC-based method)
강상훈 교수는 “로봇 관절에 모터와 함께 들어가는 감속기의 비선형 마찰 등 성능 저하 요인이 존재해도 재활로봇을 매우 정밀하게 지능적으로 제어 가능하다”며 “앞으로 재활 진단 로봇이나 치료 로봇을 설계하고 제작하는 방식이 훨씬 손쉬워 질 것”이라고 기대했다.
그는 이어 “이번 연구로 이제까지 알려지지 않았던 손목과 아래팔의 세 방향 회전의 기계적 저항을 측정하게 돼 생체역학적‧신경생리학적으로 중요한 기초자료를 제공했다”며 “세계 최초로 정상인의 손목과 아래팔의 기계적 저항 값을 측정한 자료는 환자 대상연구의 기준 값으로 사용 가능할 것”이라고 전망했다.
이번 연구는 장평훈 DGIST 교수와 박경빈 삼성전자 박사가 참여했다. 연구 결과는 ‘국제전기전자공학회 신경시스템 및 재활공학 저널(IEEE Trans. Neural Systems and Rehabilitation Engineering)’ 최신호(2017년 5월호)에 ‘주목할 만한 논문(Featured Article)’으로 발표됐다. IEEE 신경 시스템 및 재활공학 저널은 재활(Rehabilitation)부문에서 저명한 학술지다.












{kind=link}