
곽보건 학생은 레고를 가지고 놀다가 움직이는 뭔가를 만들고 싶어졌다. 직접 로봇의 골격을 짜고 플랫폼을 만드는 경지에 올랐고, ‘대한민국인재상’도 받았다. 로봇 분야에서 명실공히 ‘대한민국인재’로 거듭나고자 UNIST에 입학한 그는 3년 반 만에 학부를 최우수등급으로 마치고 기계공학과 대학원 과정을 시작했다. 배준범 교수의 연구실에서 석·박사통합과정을 보내고 있는 그의 하루를 따라가 보자.
STEP1. Research About Locomotion

생체모사로봇을 연구하는 곽보건 연구원은 동물의 움직임 등에 관한 자료를 찾기 위해 각종 서적과 논문을 찾아가며 공부한다. | 사진: 안홍범
곽보건 학생의 하루는 느지막이 시작된다. 해가 쨍쨍한 한낮보다 조용한 저녁이나 새벽 무렵에 집중이 잘되기 때문이다. 그의 주된 관심사는 생체모방로봇이다.
“지구에서 진화해온 수많은 동물을 잘 관찰해 보세요. 인간이 만든 기계보다 훨씬 우수한 운동능력을 가졌다는 걸 알 수 있을 겁니다. 이 원리를 이해하고 로봇 분야에 적용하면 더 뛰어나고 효율적인 로봇을 만들 수 있어요.”
틈틈이 다양한 논문과 서적을 찾아 동물들의 움직임과 그 원리에 대해 공부하는 곽보건 학생. 자신만의 연구 방향을 잡아나가는 그의 책장엔 곤충과 로봇에 관한 다양한 책들이 꽂혀있었다.

곽보건 학생이 로봇의 움직임을 눈으로 살피고 있다. | 사진: 안홍범
STEP2. Making Robot
곽보건 학생이 현재 집중하고 있는 연구는 문어의 유연한 다리 관절에서 영감을 얻은 다관절 4족 로봇! 28개의 관절이 부드럽게 움직이는 다관절 4족 로봇을 만들기 위해서 그는 로봇의 기구학 및 제어에 관한 논문을 찾아 공부했고, 관절을 효과적으로 움직일 아이디어도 열심히 구상했다.
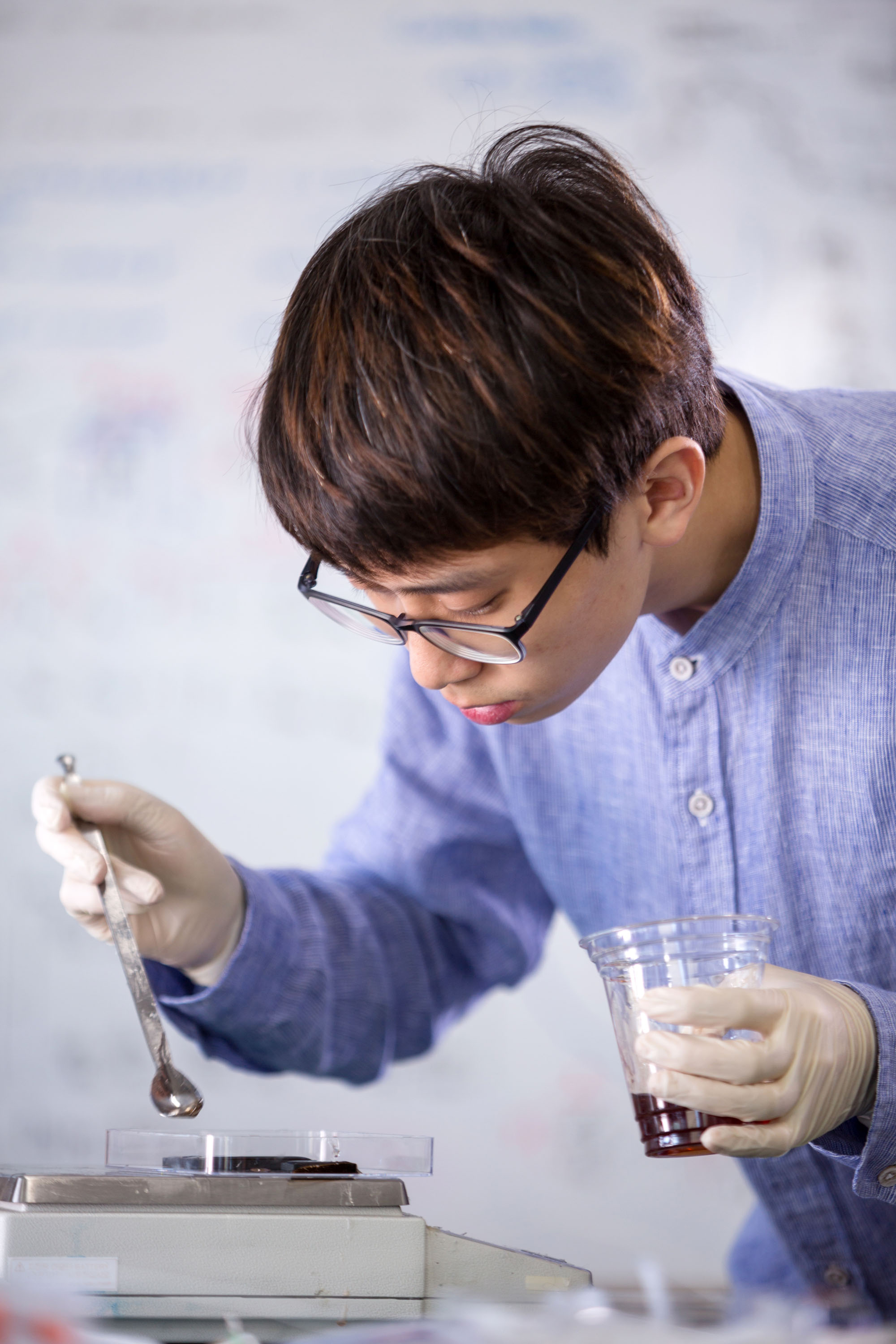
우선 그는 로봇의 구조를 최적화하는 시뮬레이션을 과정을 거쳤다. 시뮬레이션이 어느 정도 완성되면 3D 프린터를 사용해 실제 로봇 제작에 들어갔다. 이때 필요에 따라 부드러운 고분자(polymer)를 굳혀 직접 로봇의 촉각센서를 만들기도 한다.
4족 로봇에 관한 논문은 지난 7월, 캐나다 밴프에서 열린 IEEE 국제학술대회에서 ‘Best Student Paper Award finalist’에 선정됐다.
STEP3. Discussion With Coworker
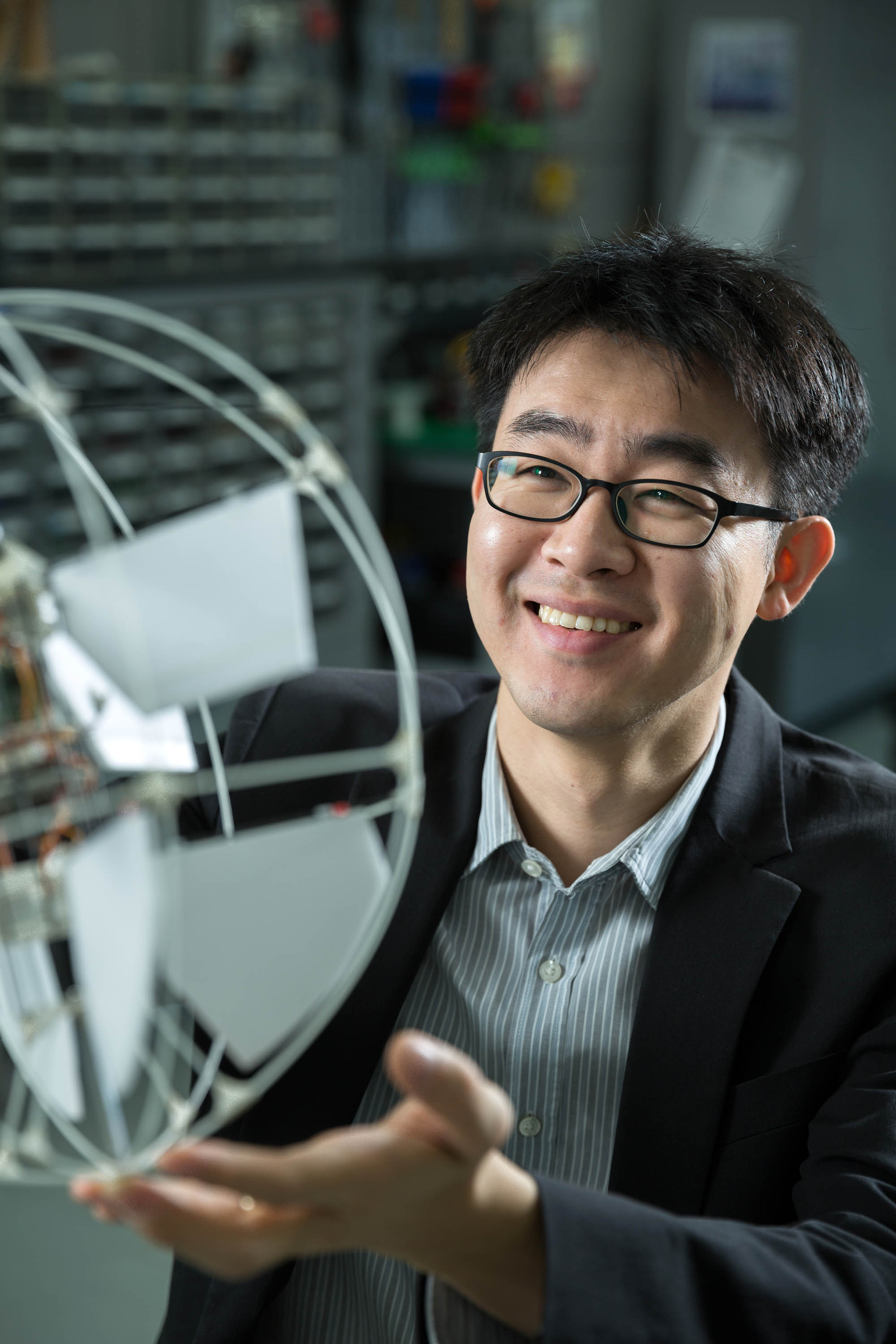
다관절 4족 로봇은 각 다리의 관절을 이용해 지상의 다양한 환경에서 움직일 수 있다. 이런 형태의 로봇을 만들고 제어하는 알고리즘을 구현하는 게 연구 목표다. 특히 이 로봇은 관절이 많아 움직임을 수학적으로 풀어쓰고 프로그래밍하는 데 많은 시간이 소요된다.

좋은 연구는 훌륭한 파트너가 따르기 마련. 박현규 학생과 곽보건 학생이 손발을 맟줘가며 프로젝트를 진행하고 있다. | 사진: 안홍범
곽보건 학생이 프로그래밍을 통해 데이터를 얻으면 같은 연구실의 박현규 학생이 로봇을 설계, 제작한다. 제작된 로봇은 초고속 카메라와 모션 캡처 카메라 등을 이용해 움직임을 측정한다. 또 실험데이터를 분석해 로봇의 성능을 검증한다. 그래서 배준범 교수의 연구실에서는 두 사람이 함께 로봇을 제어할 방법을 궁리하는 모습이 자주 목격된다고 한다.
STEP4. Take A Rest
바쁜 일상 중 휴식은 필수. 물론 연구실에 있는 대다수가 각자의 연구에 열중하는 경우가 많아 휴식 시간은 가뭄에 콩 나듯 적은 편이다. 하지만 연구실의 분위기는 대체로 자유로운 편이다.

연구하는 짬짬이 휴식을 즐기는 곽보건 학생과 동료들의 모습. | 사진: 안홍범
“제가 다른 연구실에선 생활해 본 적이 없어서 비교가 어렵지만, 저희 연구실은 정말 화기애애하다고 자부해요. 화목한 분위기이다 보니 따로 쉬는 시간이 없어도 지치지 않아요. 자유로움을 좋아하는 제가 지금껏 연구실이 즐거웠던 이유가 바로 거기에 있어요.”
STEP5. Lab Meeting With Professor
어렸을 때부터 로봇공학자가 되고 싶었던 곽보건 학생은 UNIST에 입학하자마자 배준범 교수를 찾아갔다. 전공지식이 부족한 학부생이었지만 배 교수의 지도에 따라 다양한 생체모방로봇연구에 관한 논문들을 읽으며 탄탄한 토대를 만들어나갔다. 그 덕분에 그는 남들보다 한 학기 일찍 학부를 졸업하고 대학원 생활도 누구보다 열정적으로 해나가고 있다.

배준범 교수(오른쪽 두 번째)가 학생들과 회의를 하며 프로젝트 내용을 검토하고 있다. | 사진: 안홍범
연구실 회의가 있을 때마다 최선을 다해 자료를 준비하고, 배 교수의 연구실 문을 두드리는 곽보건 학생. 이 정도 열정이면 세계적으로 저명한 로봇 연구자가 되겠다는 그의 꿈도 멀지 않아 보인다. 그가 생체모방로봇 분야에서 한 획을 그으며 UNIST의 이름을 드높일 날을 기대해본다.










{kind=link}