
로봇에게 촉각을 느끼게 하려면 어떻게 해야 할까? 김성필 교수팀은 fMRI*(기능적 자기공명영상) 촬영 이미지로 우리 뇌가 촉감을 인식하는 부위를 확인하고, 이를 로봇에서 구현하기 위한 연구에 집중하고 있다. <편집자 주>
Q. 해당 연구에 관심을 갖게 된 계기는 무엇인가요?
A. 약 8년 전부터 사람의 촉감에 대한 뇌신경과학 연구를 수행해오면서 시각이나 청각 등 다른 감각에 비해 촉각을 담당하는 뇌기능에 대해서는 아직 너무 모른다는 걸 깨달았습니다. 그래서 촉각에 대한 뇌신경 메커니즘을 좀 더 깊게 이해해보고자 fMRI라는 뇌영상기법을 이용해 인간이 촉각을 지각할 때 관여하는 뇌 영역에 대해 연구하게 됐습니다.
김성필 교수. | 사진: 아자스튜디오 남승준
Q. 그러한 기초연구 결과를 응용할 수 있는 분야가 무척 다양할 것 같은데요.
A. 예를 들어, 말초신경을 특정한 패턴으로 자극하면 손으로 만지지 않아도 가상 촉감을 만들 수 있다고 가정하고 있어요. 그래서 촉감 정보를 코딩하는 말초신경패턴에 대한 라이브러리를 개발하고 있습니다.
이 연구가 성공하면 가상현실에서 특정한 촉감을 느끼도록 해주는 장치를 만들 수 있을 것입니다. 아직까지 로봇 기술에서 촉감을 구현해주는 기술은 걸음마 수준인데요. 인간의 촉각 신경계를 닮은 인공지능 기술을 개발하고 이를 로봇에 구현하면 인간처럼 촉감을 느낄 수 있는 로봇을 만들 수 있으리라 생각합니다.
Q. 뇌가 촉감을 인식하는 부위에 대해서 설명해주세요.
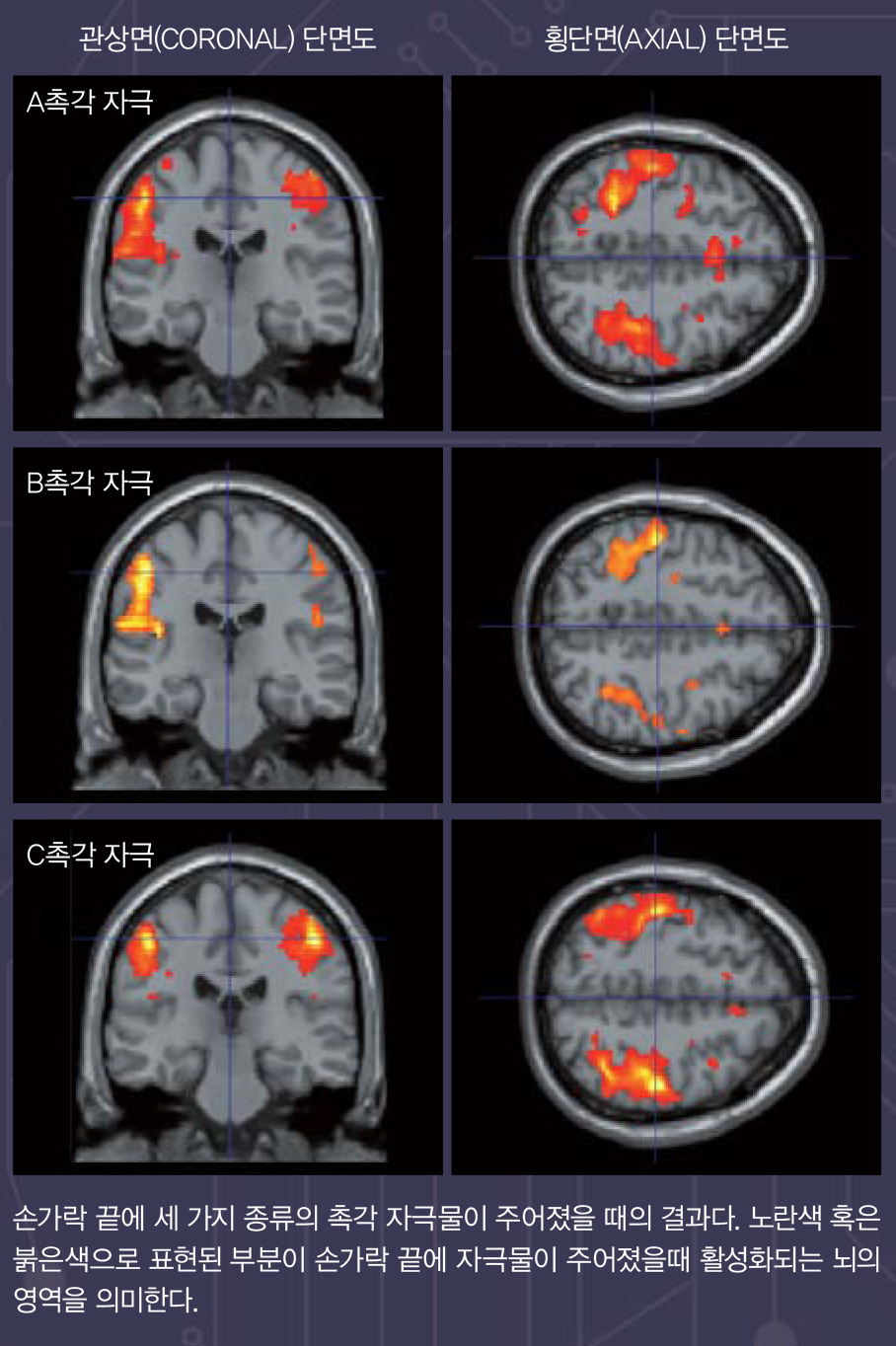
A. 신체로부터 발생한 촉각 신경신호는 우선 뇌의 시상(thalamus)이라는 영역을 거치게 되는데, 이 영역은 모든 감각 정보가 지나가는 감각정보중계국(sensory information relay station) 같은 곳입니다. 시상을 통과한 촉각 신경신호는 먼저 촉각이 발생한 신체 부위와 반대편 반구에 있는 일차체성감각피질(primary somatosensory cortex)에 도착합니다. 이 영역은 신체 부위별로 구분되어 있는데, 예를 들어 손의 촉각을 담당하는 부위와 발의 촉각을 담당하는 부위가 서로 나뉘어 있습니다.
일차체성감각피질에 있는 신경세포들은 주로 촉각 자극을 감지하는 역할을 한다고 알려져 있습니다. 그 후 촉각 정보는 양쪽 반구에 위치한 이차체성감각피질(secondary somatosensory cortex)로 전달되며, 이 영역은 질감과 같이 촉각에 대한 좀 더 상세한 정보를 처리하는 영역으로 알려져 있습니다. 또한 인슐라(insula)라는 영역도 촉각 정보 처리에 연관되어 있으며, 특히 온감에 대해 두드러진 반응을 보입니다.
만약 우리가 능동적인 형태로 촉각 자극을 받아들이게 되면(예를 들어, 표면을 손가락으로 문지르면서 질감을 느낄 때) 신체 운동과 연관되어 촉감이 발생하게 됩니다. 따라서 뇌 부위 중 보충운동영역(supplementary motor area)과 같이 운동과 관련된 영역도 촉각 정보 처리에 관여하게 됩니다.
fMRI 사진.
Q. 이를 로봇에서 구현하는 원리가 궁금합니다.
A. 저희 연구실에서는 그동안 수행한 말초신경 신호 패턴 연구와 촉감 관련 뇌 연구 결과를 토대로 인간의 신경계를 그대로 모사한 인공 신경망을 개발하고 있습니다. 즉 로봇 손에 부착된 촉각 센서에서 입력된 전기신호를 가상의 말초신경들의 발화신호(Action Potential)로 변환해줍니다.
그 후 인체의 척수 신경계와 대뇌신경계의 구조와 신호 패턴들을 수학적 모델로 모사해 계층적 인공 신경망을 구현하게 됩니다.
이렇게 개발된 촉각 정보처리 인공 신경망의 최종 출력값은 인간이 평소에 느끼는 다양한 촉감 형태로 표현되는데요. 예를 들어 거칠기, 미끄러움, 끈적임, 딱딱함, 온감 등의 기본 촉감 요소들의 일정한 강도로 나타낼 수 있습니다. 인공 신경망 내 신경세포 사이의 연결성, 신경신호의 강도 등 파라미터 값은 인간의 촉감과 가장 유사할 수 있도록 최적화시킵니다.
Q. 인간과 비교했을 때 현재 로봇이 느끼는 촉각의 범위와 강도는 어느 정도일까요?
A. 아직까지는 로봇이 느끼는 촉각은 단순하고 가벼운 터치와 온도, 거칠기 정도입니다. 촉각 강도를 느끼는 세밀함은 인간에 비해 상당히 떨어집니다. 또한 인간의 신체와 같이 수많은 센서를 통합해 촉각 정보를 처리하는 기능은 로봇에게는 아직 구현되지 않고 있는 상황입니다.
Q. 이 연구의 의미와 향후 활용 가능성에 대해 말씀해주세요.
A. 촉각에 대한 뇌 연구는 학술적 의의와 함께 앞으로 다양한 방향으로 기술 개발이 가능합니다. 로봇에 촉감을 느낄 수 있는 능력을 부여하는 것 외에도 인간의 촉각 기능을 대체할 수 있는 많은 기술들을 창출할 수 있습니다.
예를 들어, 보통 의사가 손으로 만지면서 진단하던 유방암 진단 같은 부분을 촉각 기능이 구현된 영상 시스템으로 대체해 더욱 객관적이고 정밀하게 진단할 수 있을 것입니다. 또한 촉각 지각 능력을 측정해 치매 등 인지장애에 대한 진단 기술을 개발할 수 있으며, 촉각 감지 센서 시스템을 이용해 다양한 표면 재질을 정량적으로 측정하고 데이터베이스를 만들어 의류나 화장품 산업 등에 활용할 수 있습니다.
Q. 앞으로의 연구 계획이 궁금합니다.
A. 현재 UNIST의 지원을 받아서 전기전자컴퓨터공학부의 김학선·김재준 교수님, 에너지 및 화학공학부의 고현협·이지석 교수님과 함께 촉각 인식 기술 개발 연구를 진행하고 있습니다. 또한 전기전자컴퓨터공학부의 전세영·최재식 교수님과 함께 시각과 촉각을 동시에 이용해 로봇이 다양한 물체를 집어서 조작할 수 있는 인공지능을 개발하는 연구도 수행하고 있습니다.
궁극적으로는 촉각에 대한 신경과학적 이해를 바탕으로 인공 촉각 지능 기술을 개발하는 연구 분야를 선도하는 연구실로 성장해나가는 것이 목표입니다.
글: 김성필 디자인 및 인간공학부 교수
김성필 교수는 뇌신호를 측정하고 분석해 사람의 마음을 연구한다. 서울대 원자핵공학과 재학 시절 심리학에 막연히 관심을 가졌다가 미국 유학 중 우연히 접한 뇌공학에 푹 빠져들었다. 말초신경 신호 패턴 연구와 촉감 관련 뇌 연구 결과를 토대로 인공 신경망을 개발하고 있다.












{kind=link}