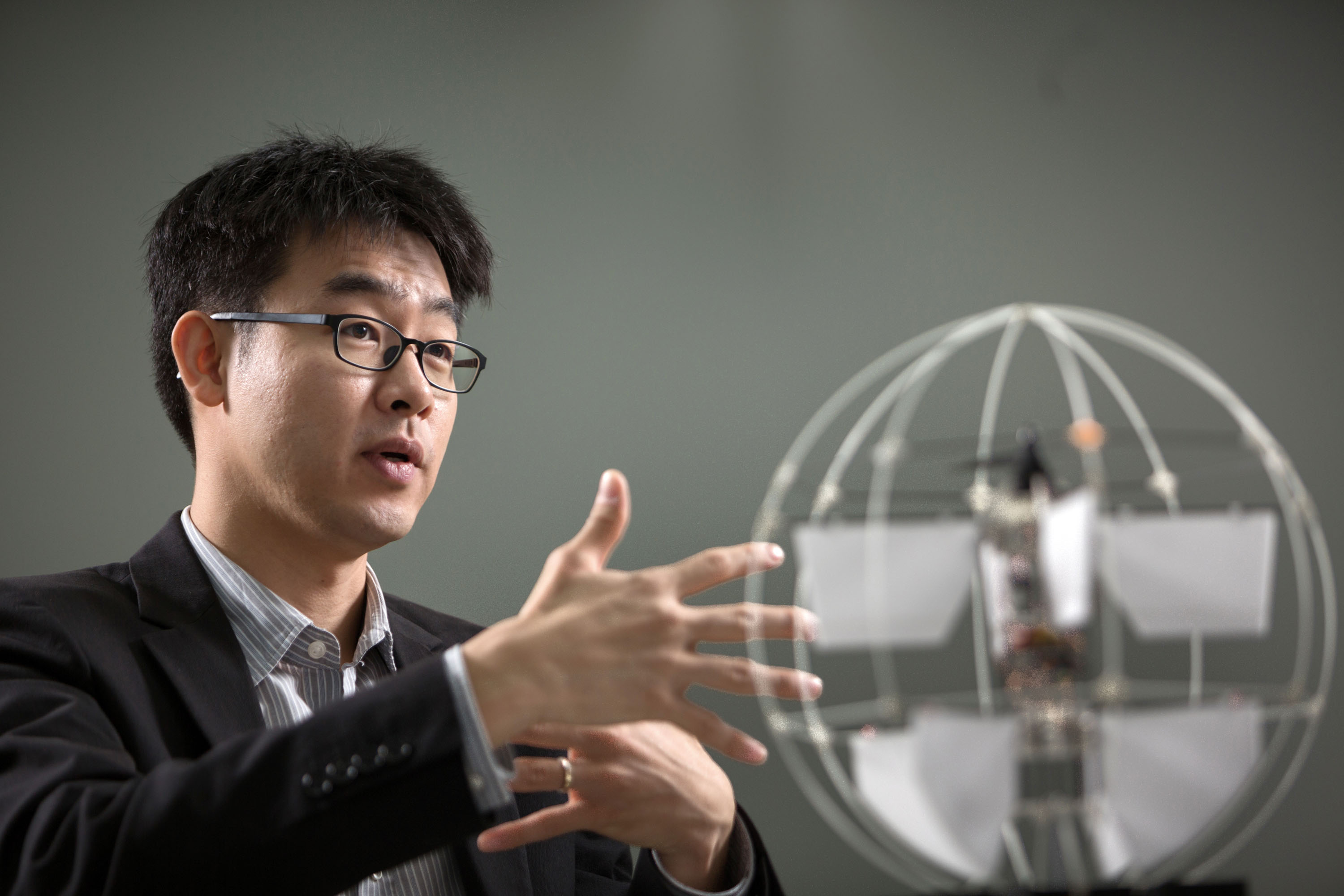
“비행 방식에는 크게 세 가지 종류가 있어요. 일반 비행기 같은 고정익 방식, 헬리콥터 같은 회전익 방식, 새나 곤충 같은 생명체처럼 날개를 펄럭거리며 나는 방식이에요. 고정익 비행체는 고정된 익면(날개 표면)에서 발생하는 양력으로 비행하는 항공기를 말해요. 회전익 비행체는 회전하는 프로펠러에 의해 양력이 발생되는 항공기를 말하고요. 저는날 수 있는 기능을 갖는 로봇의 형태 중 하나로 드론에 접근하고 있어요. 최종적으로는 독수리 같은 로봇을 만들고 싶어요. 자유자재로 잘 날면서도 안정적인 로봇이요.”
기계 및 원자력공학부 배준범 교수의 꿈과는 달리 드론은 아직 완전치 않다. 원격 조정인 만큼 비행하다 불시착할 우려가 있다. 주변 물체와 부딪히게 되면 더 이상 비행이 불가능해지는 것은 물론, 주변 환경에 피해를 줄 수도 있다. 새로운 모양의 드론을 설계하면 문제를 해결할 수 있을까.
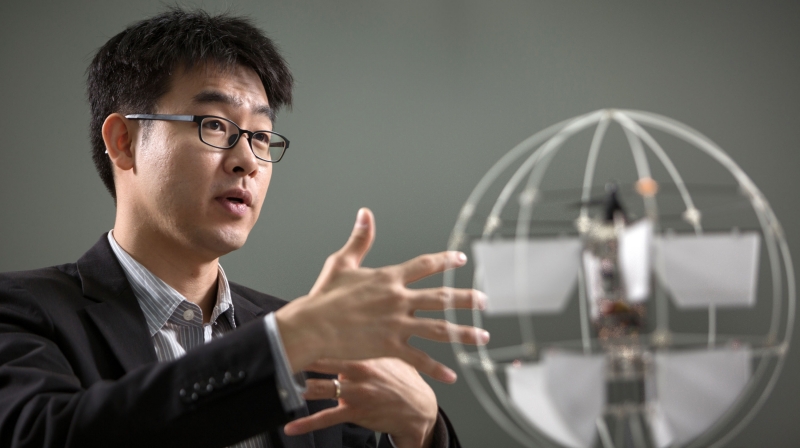
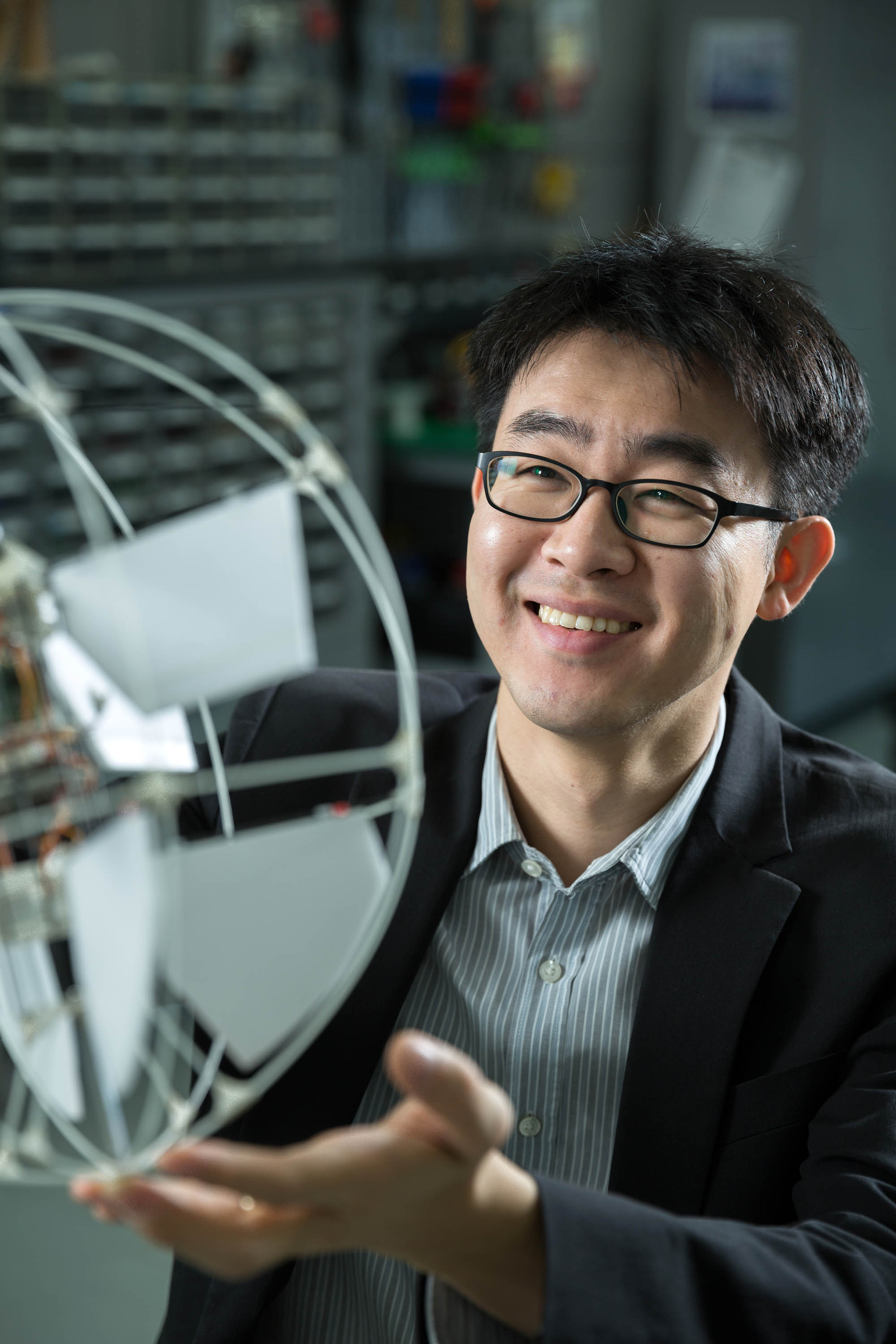
“드론을 띄우는 기술 자체는 큰 문제가 아니에요. 다만 착륙 시 조금만 잘못해도 넘어지기 때문에 재이륙이 불가능할 수도 있어요. 또 실내에서 사용하려면 좁은 공간에서 다른 물체와 부딪혀도 스스로를 보호할 수 있는 기술이 필요해요. 그래서 외형을 구형으로 만들게 됐지요.”
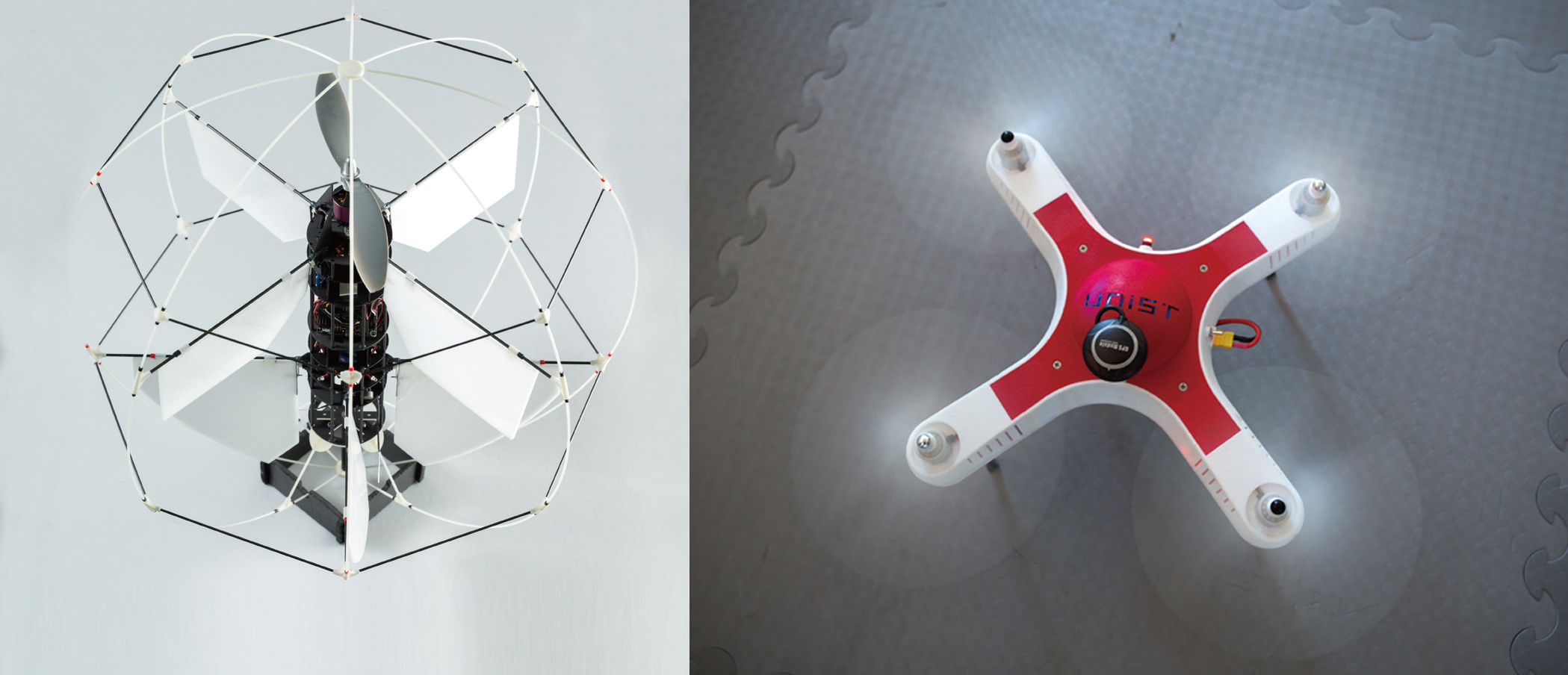
왼쪽은 2013년 개발된 배준범 교수팀의 유니콥터이고, 오른쪽은 손흥선 교수팀이 개발한 유니드론이다. | 사진: 안홍범
최근 스위스 플라이어빌리티 사가 내놓은 ‘짐볼(Gimball)’은 기존 드론에 탄소섬유 뼈대를 축구공 모양으로 에워싼 형태를 하고 있다. 비행 중 뼈대가 장애물에 부딪쳐도 원형 축이 회전해 계속 날 수 있다는 게 장점이다. 2013년 배 교수팀이 만든 드론, ‘유니콥터(UNI-copter)’ 역시 구형이다. 프로펠러 등 드론의 주요 부위를 구형 테두리가 감싸고 있기 때문에, 주변과 충돌하더라도 드론은 물론 주변 물체까지 모두 보호할 수 있다. 다양한 지형에서 이・착륙이 가능한 것도 특징이다.
배 교수는 새로운 형태의 드론도 계속 구상 중이다. UFO 형태로 모터가 안에 숨어 있는 드론도 그중 하나다. 이 드론은 코안다 효과(coanda-effect)를 이용해 양력을 발생시킨다. 코안다 효과는 물이나 공기 같은 유체가 굽은 표면을 통과할 때 들러붙는 현상이다. 이로 인해 공기가 드론의 겉면을 따라 흐르면 위로 뜨는 힘이 생긴다.
▲ 배준범 교수팀이 개발한 유니콥터 소개 영상
배준범 교수가 말하는 드론 설계:
 “독수리를 보세요. 몸집이 큰 지상의 먹잇감을 정확하게, 흔들림 없이 낚아채지요. 이건 현재의 기술로는 쉽게 구현하기 어려운 기술이에요.”
“독수리를 보세요. 몸집이 큰 지상의 먹잇감을 정확하게, 흔들림 없이 낚아채지요. 이건 현재의 기술로는 쉽게 구현하기 어려운 기술이에요.”
배준범 교수는 아직 인간의 기술이 자연 속에서 살아가는 생물에 비할 정도가 아니라고 말한다.
“기술의 완성을 100으로 친다면 70~80까지는 쉽게 갈 수 있어요. 그런데 나머지 20~30에 도달하는 게 어려워요. 이제 드론은 단순히 비행만이 문제가 아니에요. 비행 상태에서 드론이 스스로 주변 상황을 인식해야 하고, 배달하거나 촬영을 하는 등 다양한 행위를 해야 하지요. 이런 기술들이 발전하려면 시간이 필요해요. 이게 바로 20~30의 영역이지요.”











{kind=link}