
Soft inflatable robots have emerged as a promising paradigm for applications that require inherent safety and adaptability. However, the integration of sensing and control systems in these robots has posed significant challenges without compromising their softness, form factor, or capabilities. Addressing this obstacle, a research team jointly led by Professor Jiyun Kim (Department of Materials Science and Engineering, UNIST) and Professor Jonbum Bae (Department of Mechanical Engineering, UNIST) has developed groundbreaking “soft valve” technology—an all-in-one solution that integrates sensors and control valves while maintaining complete softness.
Traditionally, soft robot bodies coexisted with rigid electronic components for perception purposes. The study conducted by this research team introduces a novel approach to overcome this limitation by creating soft analogs of sensors and control valves that operate without electricity. The resulting tube-shaped part serves dual functions: detecting external stimuli and precisely controlling driving motion using only air pressure. By eliminating the need for electricity-dependent components, these all-soft valves enable safe operation underwater or in environments where sparks may pose risks—while simultaneously reducing weight burdens on robotic systems. Moreover, each component is inexpensive at approximately 800 Won.
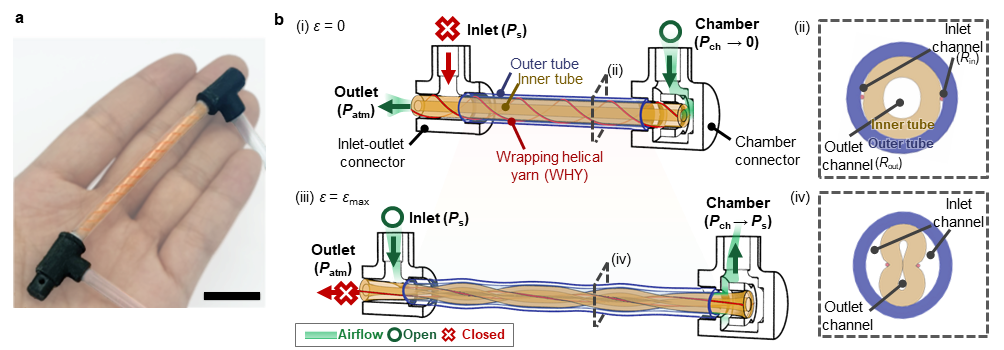
Figure 1. Soft self-sensing tensile valve (STV) transducing strain into manageable proportional output pressures.
“Previous soft robots had flexible bodies but relied on hard electronic parts for stimulus detection sensors and drive control units,” explained Professor Kim. “Our study focuses on making both sensors and drive control parts using soft materials.”
The research team showcased various applications utilizing this groundbreaking technology. They created universal tongs capable of delicately picking up fragile items such as potato chips—preventing breakage caused by excessive force exerted by conventional rigid robot hands. Additionally, they successfully employed these all-soft components to develop wearable elbow assist robots designed to reduce muscle burden caused by repetitive tasks or strenuous activities involving arm movements. The elbow support automatically adjusts according to the angle at which an individual’s arm is bent—a breakthrough contributing to a 63% average decrease in the force exerted on the elbow when wearing the robot.
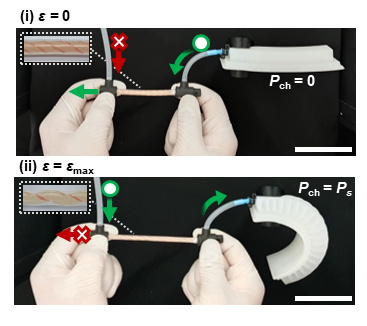
Figure 2. Operational photographs of the STV-controlled soft actuator when the tensile strain ε = 0 (i) and ε = εmax (ii). Insets: close-up images of the STV. Scale bars = 5 cm.
The soft valve operates by utilizing air flow within a tube-shaped structure. When tension is applied to one end of the tube, a helically wound thread inside compresses it, controlling inflow and outflow of air. This accordion-like motion allows for precise and flexible movements without relying on electrical power.
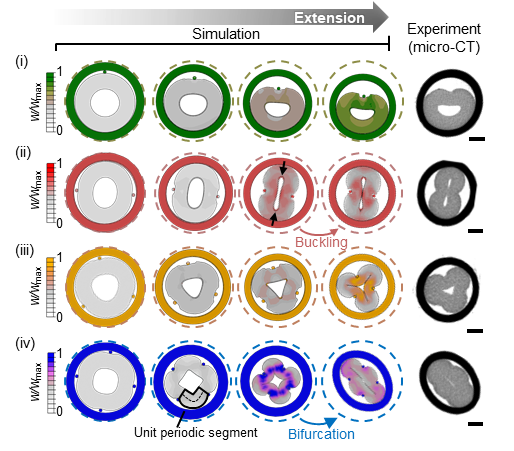
Furthermore, the research team confirmed that by programming different structures or numbers of threads within the tube, they could accurately control airflow variations. This programmability enables customized adjustments to suit specific situations and requirements—providing flexibility in driving unit response even with consistent external forces applied to the end of the tube.
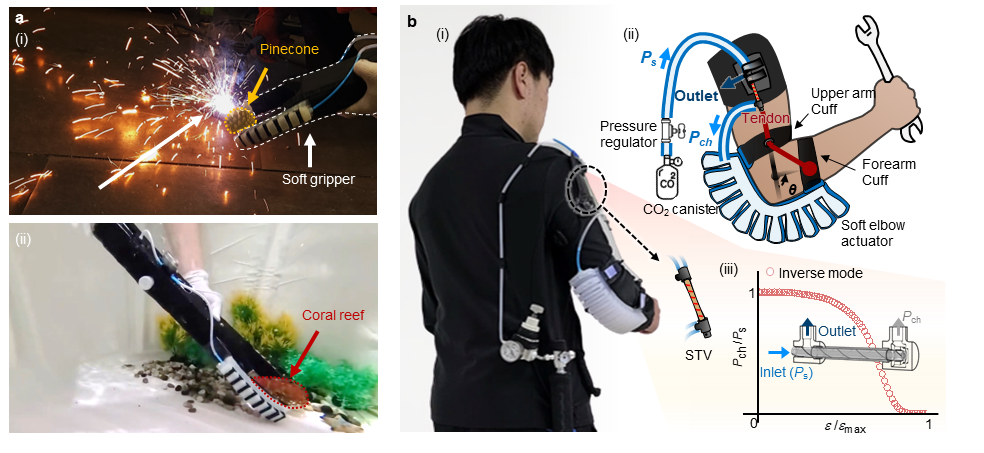
Figure 3. (a-i) Photographs of the soft gripper handling a pinecone near a welding arc (which can affect electronic circuits by electromagnetic interference), and (a-ii) coral reef under water. (b) Overview of the soft exosuit. A photograph of the soft exosuit on a user (i) and details of the soft exosuit (ii). The STV (n = 2, p = 10 mm, L0 = 80 mm) is connected in inverse mode, where the produced normalized chamber pressure Pch/Ps is a decreasing function of the normalized strain ε/εmax (iii).
“These newly developed components can be easily employed using material programming alone, eliminating electronic devices,” expressed Professor Bae with excitement about this development. “This breakthrough will significantly contribute to advancements in various wearable systems.”
This groundbreaking soft valve technology marks a significant step toward fully soft, electronics-free robots capable of autonomous operation—a crucial milestone for enhancing safety and adaptability across numerous industries.
The study findings have been published ahead of their official publication in Nature Communications’ online version on July 4, 2023. Support for this work was provided by various organizations including Korea’s National Research Foundation (NRF), Korea Institute of Materials Science (KIMS), and Korea Evaluation Institute of Industrial Technology (KEIT).
Journal Reference
Jun Kyu Choe, Junsoo Kim, Hyeonseo Song, et al., “A soft, self-sensing tensile valve for perceptive soft robots,” Nat. Commun., (2023).









{kind=link}